|
# |
Type |
Description |
Overview |
|---|---|---|---|
|
1 |
New Feature |
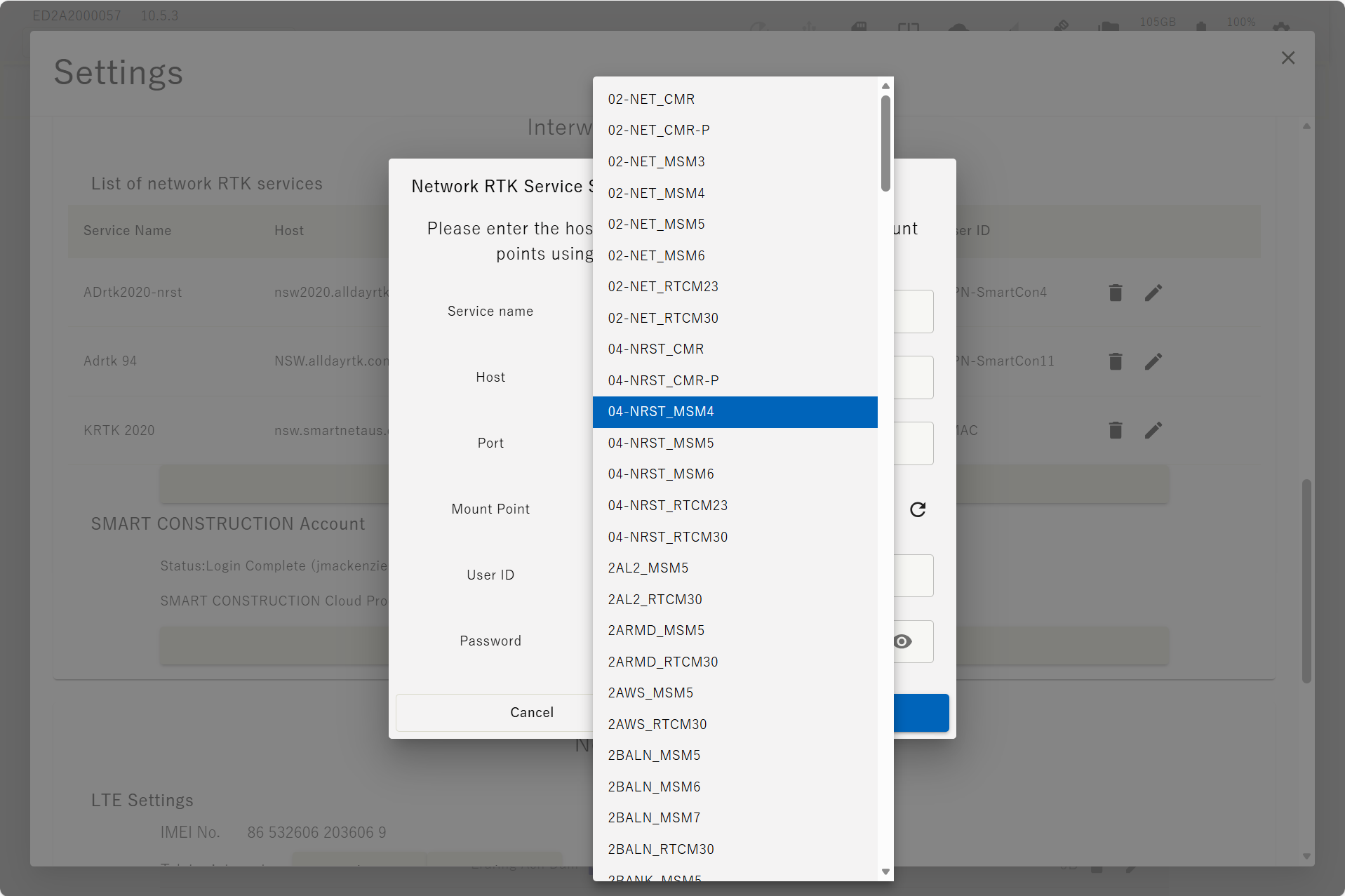
Download Mount Point List |
In the Edge2 settings screen, specifying the mount point for the network RTK service has changed from manual entry to a download-based method. 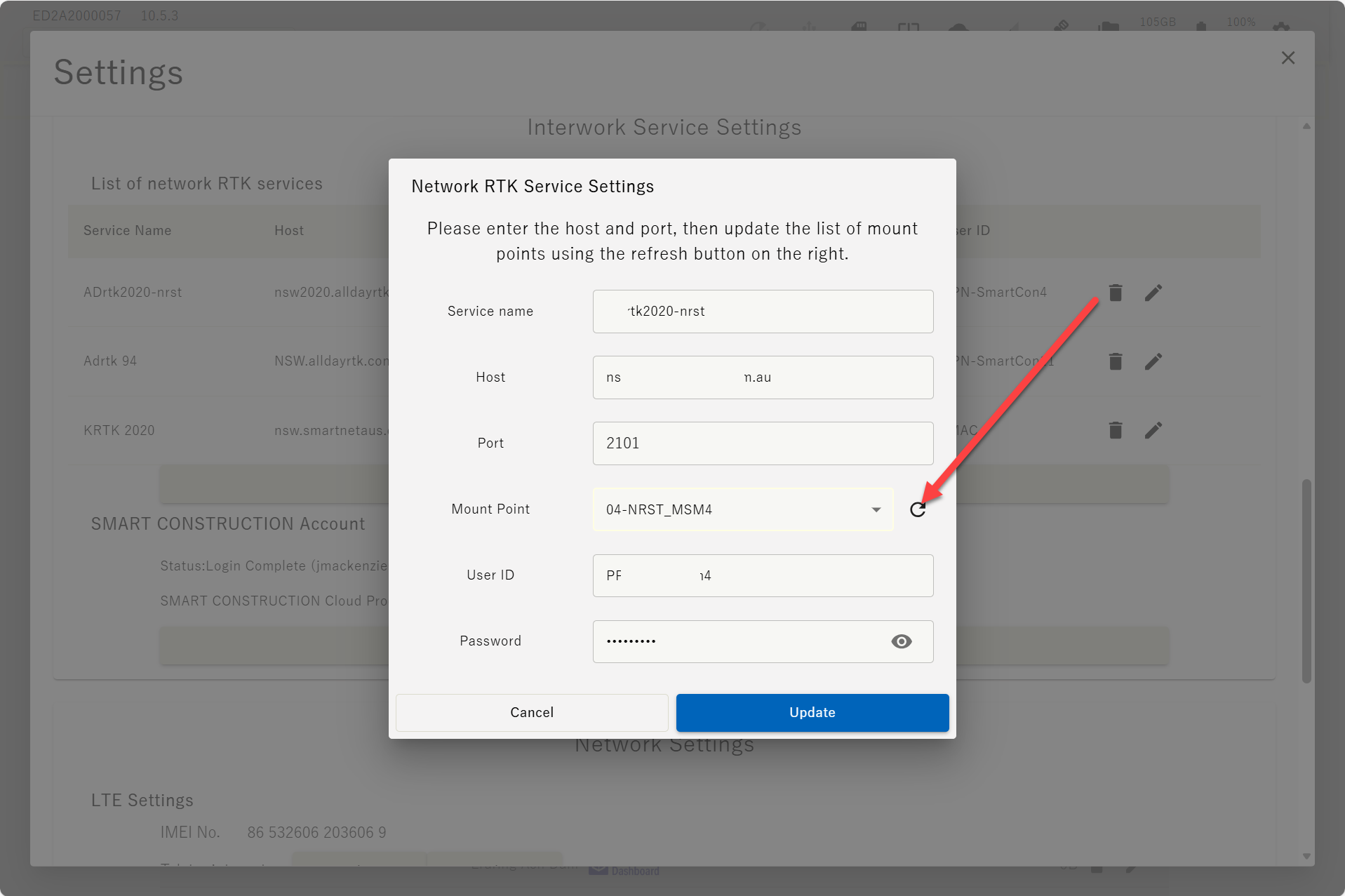
|
|
2 |
New Feature |
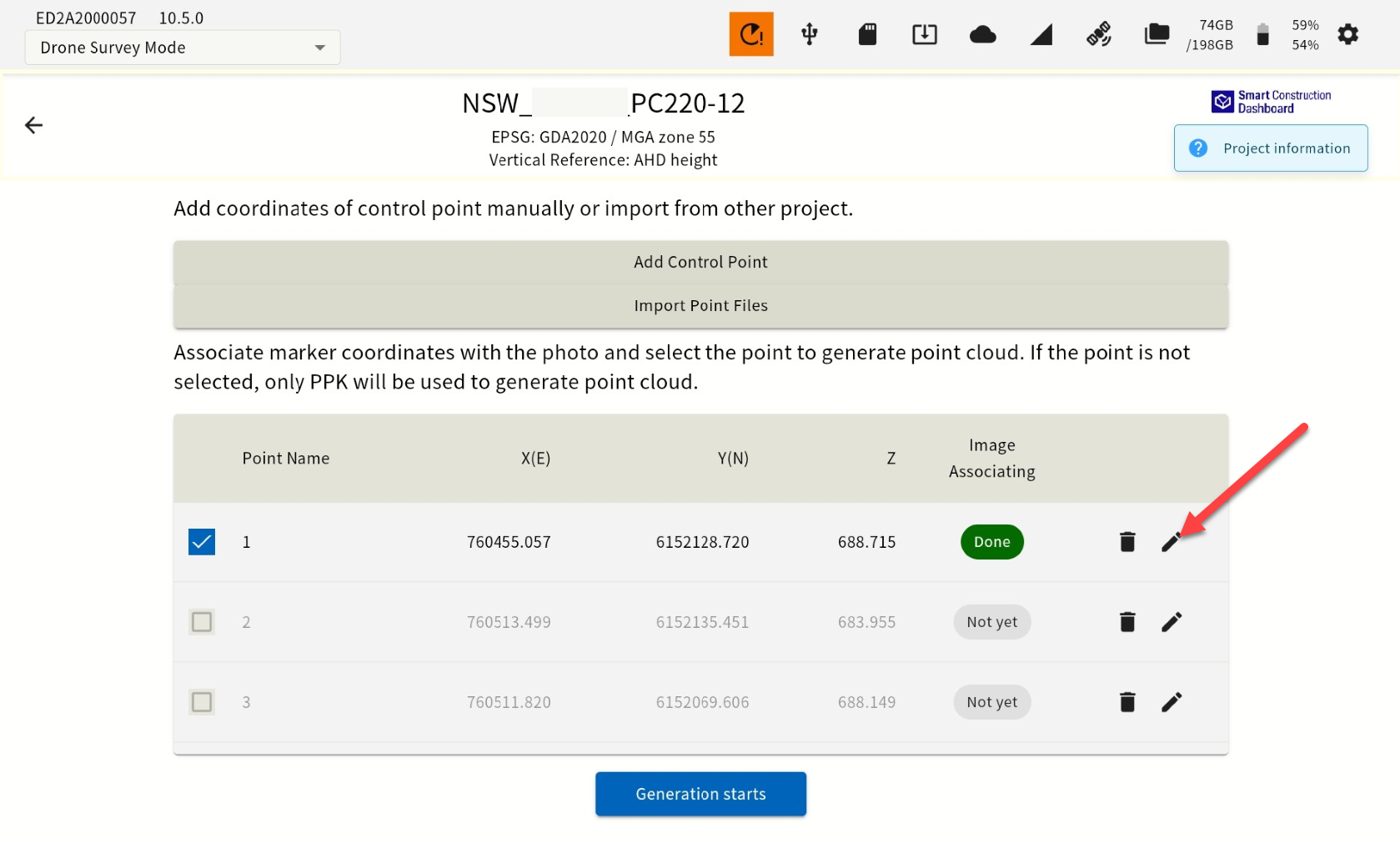
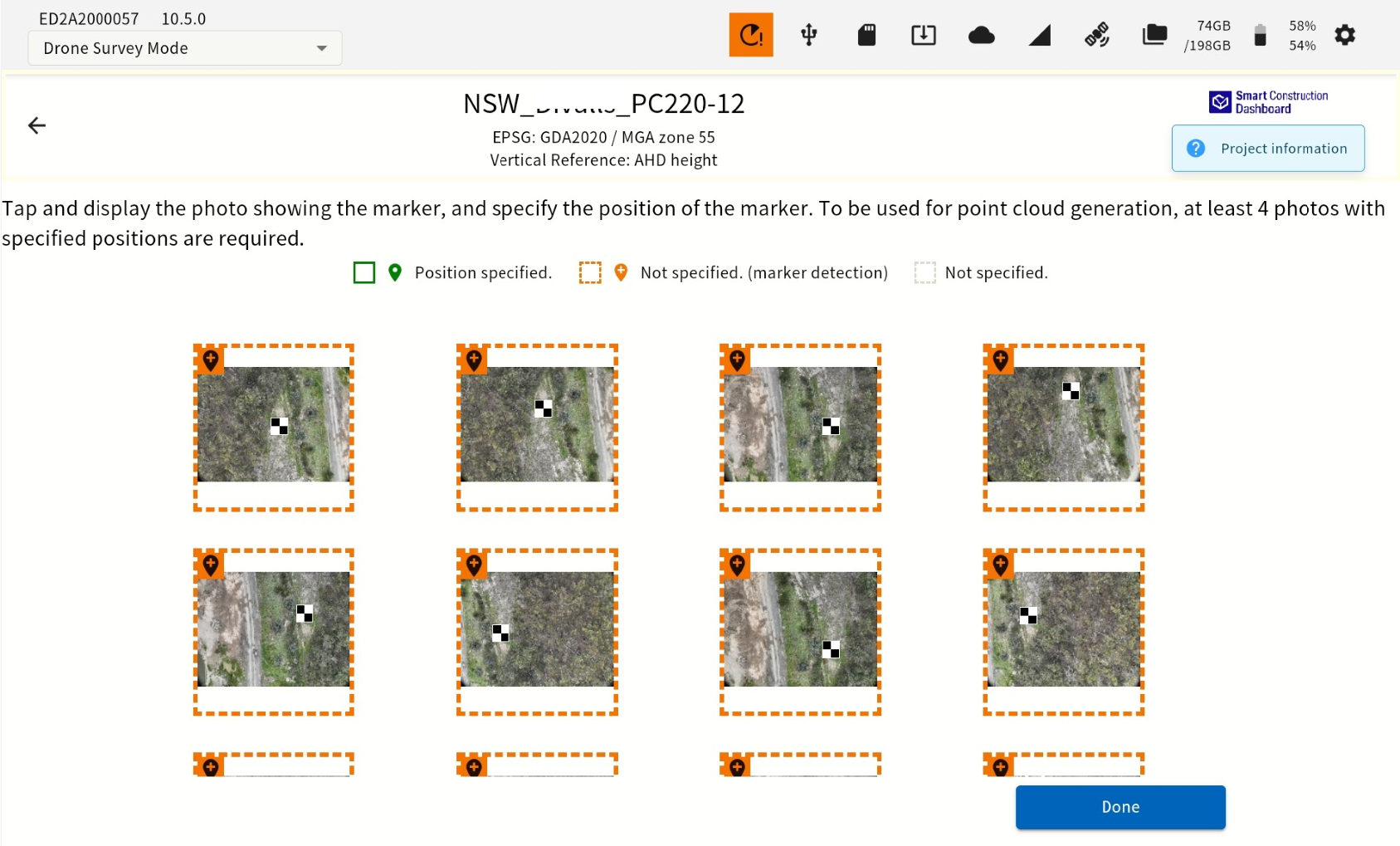
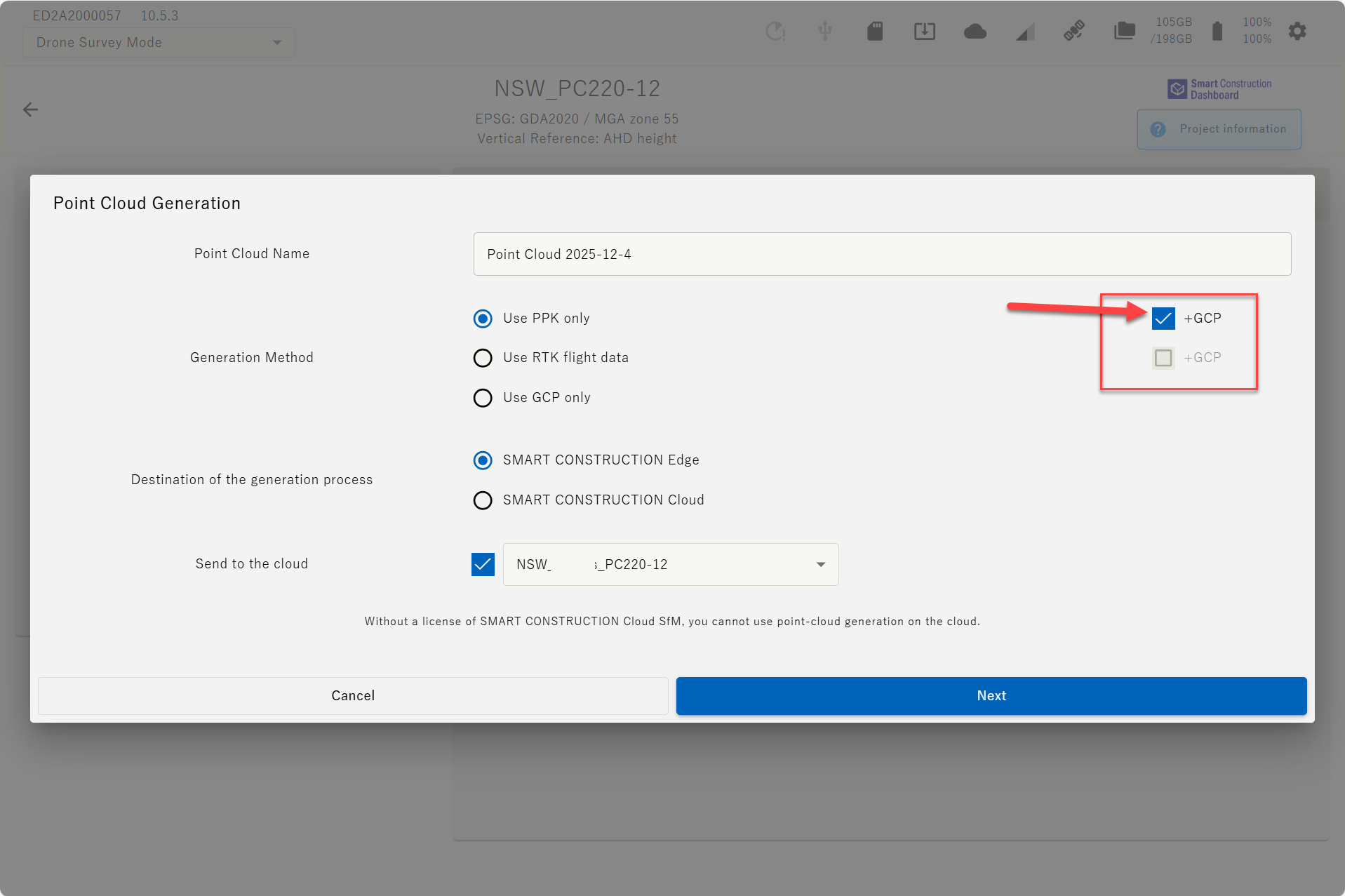
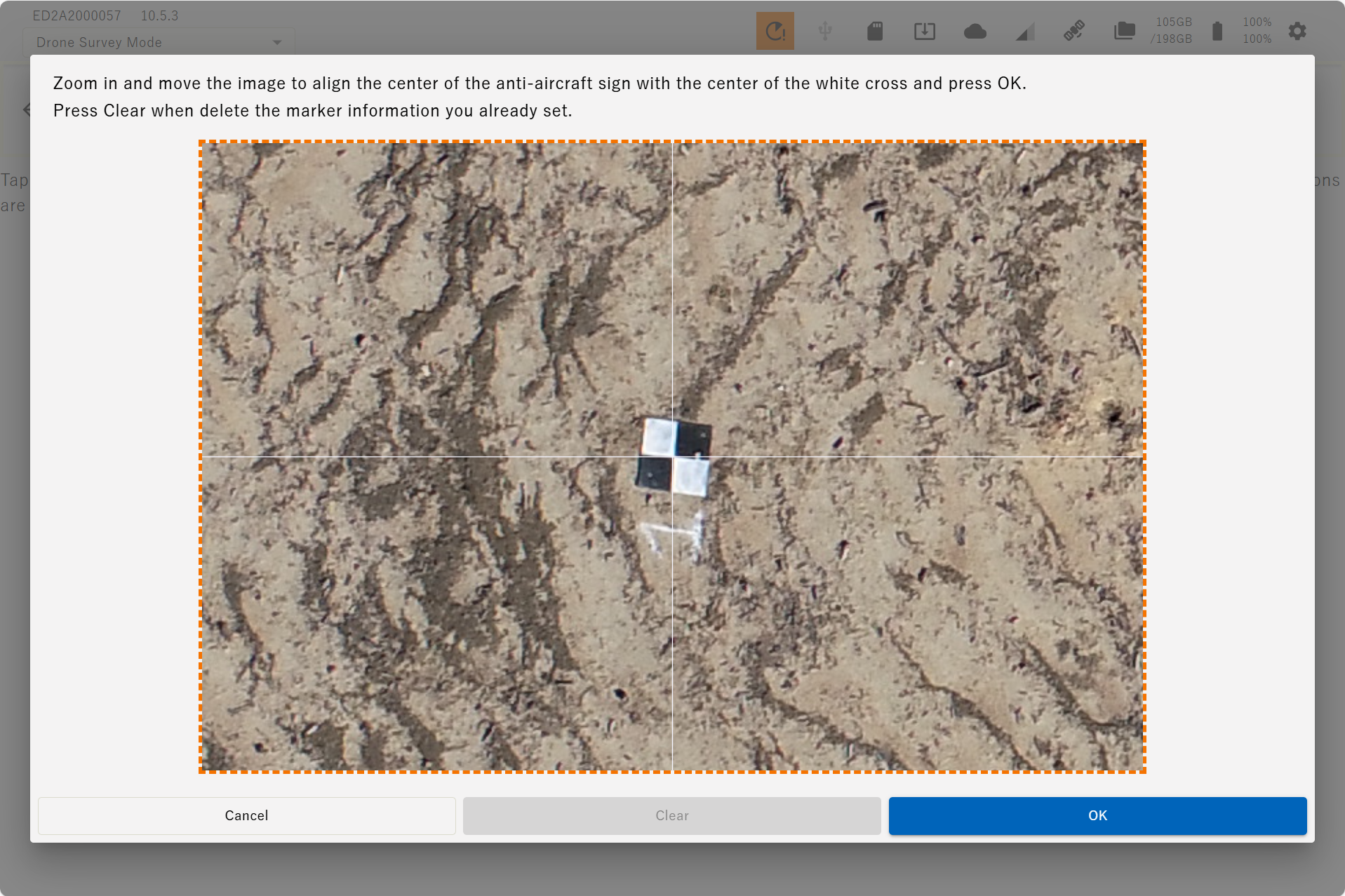
GCP tagging improvement AI |
We introduced an AI feature that automatically detects the center of certain GCP markers during SFM processing with aerial target markers (GCP). During the GCP annotation, GCPs which is close to the coordinates entered will be automatically detected as shown below, and photos of the detected markers will be highlighted in orange.


Important Information 
|
|
3 |
Improvement |
Support a new drone DJI MATRICE400(Zenmuse P1) |
Using DJI M400( with P1 Camera) achieved +/- 5cm level accuracy.
Use the same Camera and drone settings as for Mavic3E & Matrice 4E. Different shutter speed may need to be set for the P1 camera |
|
4 |
Improvement |
SFM performance improvement |
SFM performance (Improve the quality of the point cloud) and DTM quality Improvement (lower noise ) |
|
5 |
Bug Fix |
|
|